
Pourquoi contrôler la mise au point
La mise au point sur les appareils reflex se fait à partir d’un module d’autofocus (AF) qui est basé sur la technologie de détection de phase. C’est un système indépendant du capteur photo, il utilise des capteurs spécifiques logés dans à la base du boitier, sous le miroir.
Pour plus de détails, voir l’ article de Bernard Rome ou un autre paru dans Focus numérique.
Ce système très complexe a principalement comme avantage sa réactivité et comme inconvénient des décalages de mise au point avec certains boitiers et objectifs.
La mise au point doit être d’autant plus précise que la profondeur de champ est faible, c’est le cas lorsque l’objectif est utilisé aux grandes ouvertures.
La profondeur de champ se réduit aussi avec le diamètre du cercle de confusion qui est d’autant plus faible que les pixels du capteur sont petits. Les appareils reflex numériques ont une résolution importante, avec souvent plus de 20 millions de pixels d’où des pixels de petite taille. Pour plus de détails voir l’article sur la profondeur de champ.
Les deux paramètres, grande ouverture et petite taille des pixels sur le capteur, nécessitent un système d’autofocus performant.
Continuer la lecture de Contrôle de l’autofocus d’un appareil reflex – décalage de la mise au point
Archives de catégorie : technique
la profondeur de champ en photographie numérique
Profondeur de champ
La profondeur de champ est la zone de netteté que l’on obtient sur une photo. Elle se caractérise par une distance minimale et une distance maximale de netteté.
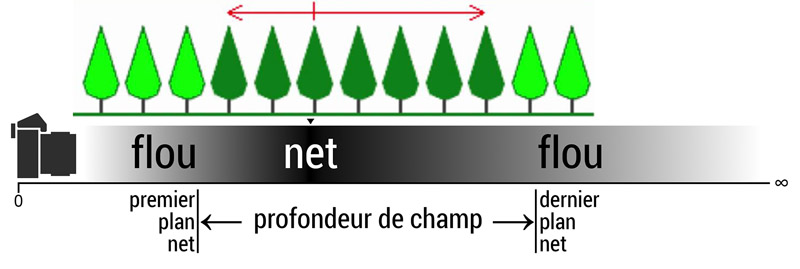
Plusieurs paramètres influent sur la profondeur de champ : diaphragme, distance de mise au point, distance focale de l’objectif et le cercle de confusion.
Calcul de la profondeur de champ
Le calcul de la profondeur de champ est relativement simple.
Lorsque la distance de mise au point est très supérieure à la distance focale, on utilise les formules suivantes :
H = f x f/(N x c) Dmin = H x Dmap/(H + Dmap) Dmax = H x Dmap/(H – Dmap) PdC = Dmax – Dmin
f : distance focale de l’objectif
N : diaphragme
c : cercle de confusion
H : hyperfocale (distance du premier plan net lorsque l’objectif est réglé pour une distance infinie)
Dmap : distance de mise au point
Dmin : distance du premier plan net
Dmax : distance du dernier plan net
PdC : profondeur de champ
Toutes les longueurs sont exprimées dans la même unité.
Cercle de confusion
Historiquement, en photographie argentique, le cercle de confusion est sur une image, le diamètre des plus petits points juxtaposés discernables à l’œil nu à une distance normale de vision.
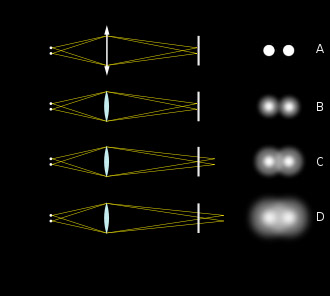
d’après Wikipedia
Les deux points idéaux sont séparés en A.
Ils sont encore bien définis en B et ne le sont plus en D.
Le cercle de confusion est proche du diamètre des points en C
L’oeil humain doté d’une bonne acuité visuelle (10/10) est capable de séparer des détails distants de 0,2 mm et situés sur une feuille à 25 cm. Le champ de vision correspond à un cercle de 29 cm de diamètre à cette distance . Ramenée à un capteur 24X36 mm (6,7 fois moins large), la résolution passe à 0,030 mm.
C’est la définition du cercle de confusion pour un film 24X36. Pour un film APS (18X24) on aura un cercle de confusion de 0,020 mm.
Cette définition est très couramment utilisée en photographie numérique, encore actuellement : ici et là
Il est pourtant facile de faire un agrandissement de l’image numérique sur un écran et de se rendre compte qu’on peut discerner des détails plus fins que 0,020 mm sur un capteur de taille « APS-C ».
Christophe Métairie a montré par expérimentation que le cercle de confusion est d’environ 1,5 fois la largeur d’un pixel que ce soit pour un Pentax 645D moyen format de 40 M pixels ( un pixel fait 0,0066 mm de large) ou pour un compact Canon S80 (pixel de 0,0047 mm).
J’ai pu vérifier cette mesure en photographiant une mire inclinée à 20° et graduée en cm dans les plans verticaux.
Ce type de mire est utilisé pour vérifier et régler le calage de la mise au point ( voir Lensalign ou SpyderLenscal)
Conditions de prises de vue :
Appareil : Canon 5D Mk3
Objectif : Canon 50mm F1,4 ouvert à F1,4
Mise au point à 2,5 m
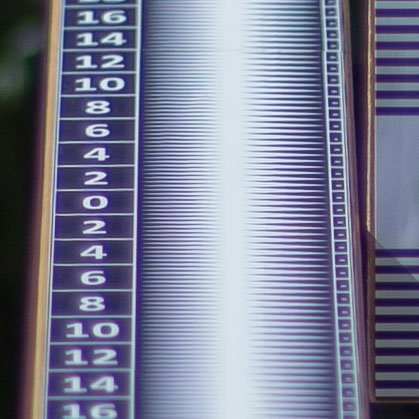
On constate que la zone de netteté s’étend de 4 cm en avant et 4 cm en arrière par rapport à la cible de mise au point.
La profondeur de champ fait environ 8 cm.
En utilisant le calculateur ci-dessus configuré avec un cercle de confusion de 1,5 pixels ( 9,4 microns pour le Canon 5D Mk3) , on arrive à une profondeur de champ calculée de 6,7 cm
Avec la méthode de l’acuité visuelle, utilisant un cercle de confusion de 30 microns, la profondeur de champ serait de 21 cm.
Or on voit nettement que la zone de netteté sur ma mire est bien plus réduite.
Exemples de profondeur de champ
Exemple 1 :
Canon 600 D (APC-C) avec un objectif de 35 mm ouvert à F:5,6 et une mise au point à 5 m.
On prendra comme cercle de confusion :
– acuité visuelle 0,030 mm en 24 x 36 et 0,019 mm en APS-C (mettre une définition de 2,2 millions de pixels dans le calculateur)
– 1,5 pixels (0,0065 mm)
on obtient :
| cercle de confusion (mm) | 0,019 | 0,0065 |
| hyperfocale (m) | 11,5 | 33,7 |
| distance premier plan net (m) | 3,5 | 4,4 |
| distance dernier plan net (m) | 8,8 | 5,9 |
| profondeur de champ (m) | 5,3 | 1,5 |
On voit que la zone de netteté est plus réduite en utilisant une valeur de cercle de confusion de 1,5 pixels.
Les tables anciennes de profondeur de champ, calculées avec la méthode de l’acuité visuelle, ne sont pas adaptées aux appareils numériques actuels pour tirer le maximum de résolution dans la zone considérée comme nette autour de la distance de mise au point.
Exemple 2 :
Profondeur de champ gravée sur l’objectif Canon FD 50 mm F 1,8 d’un reflex argentique.
 Pour une mise au point de 2 m, avec une ouverture de F 22, la profondeur de champ s’étend d’environ 1,3 m à 4,5 m soit une profondeur de champ de l’ordre de 3,2 m
Pour une mise au point de 2 m, avec une ouverture de F 22, la profondeur de champ s’étend d’environ 1,3 m à 4,5 m soit une profondeur de champ de l’ordre de 3,2 m
En reprenant le calculateur ci dessus, avec les données : distance 2m, F22 et 2,2 million de pixels on trouve une cercle de confusion de 0,030mm et une largeur de « pixels » de 0,020 mm et une profondeur de champ de
Ces calculs montrent que Canon est parti d’un cercle de confusion de 30 microns pour trouver une profondeur de champ 2,9 m proche de de la valeur gravée sur l’objectif.
Cas de la macrophotographie
Le sujet est proche de l’appareil et on travaille avec des grandissements voisins de 1 ou plus. Le grandissement G est le rapport entre la taille du sujet et celle de son image sur le capteur.
La profondeur de champ est égale à :
PdC = 2 x N x c x (G+1) /( G x G)
Cette formule est à utiliser lorsque le grandissement est supérieur à 0,1